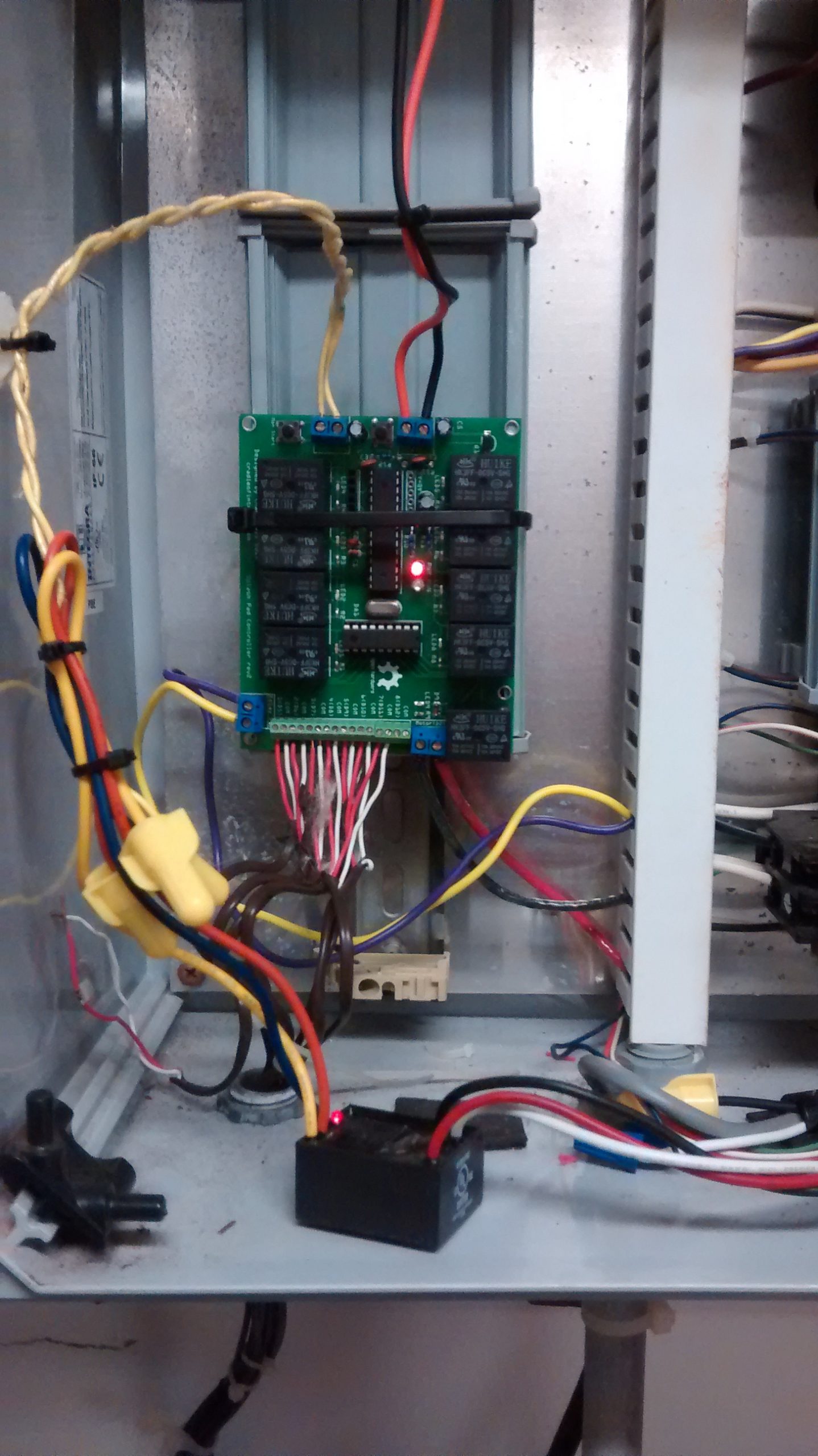
So the last PCB with the tacked on diodes finished off the 2014 season. I did have an issue at the begining of the year, but luckily that was just an isue with the 5v wall wart I was powering board with.
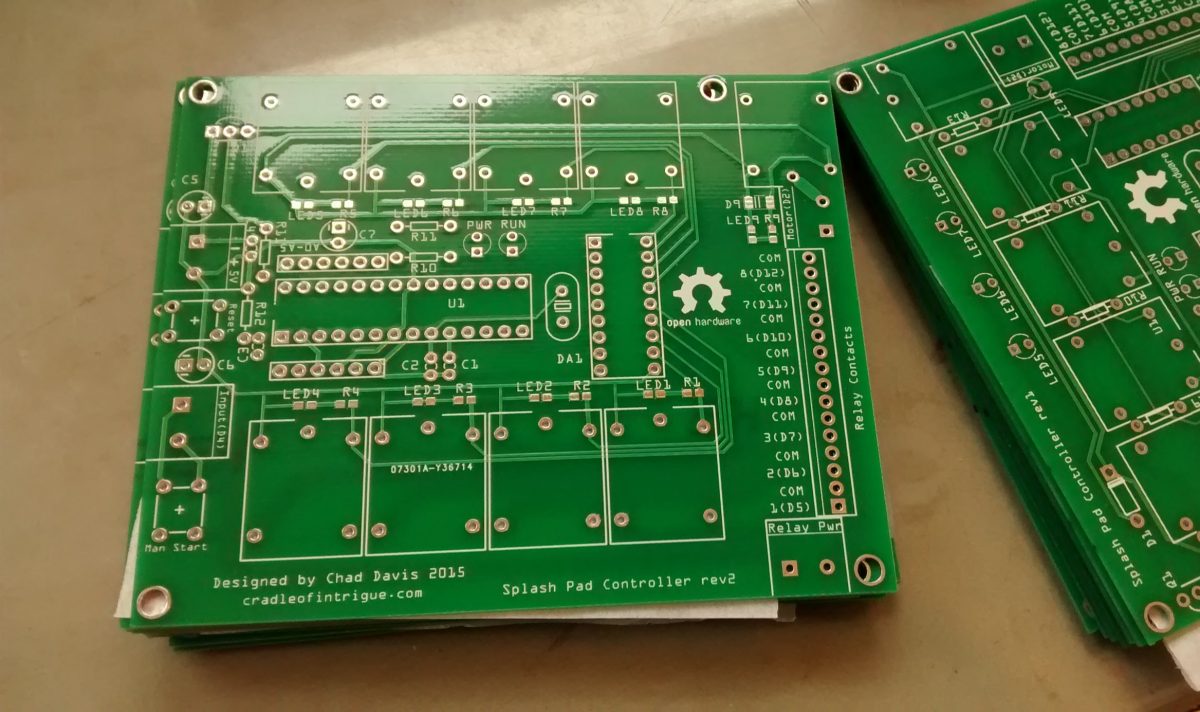
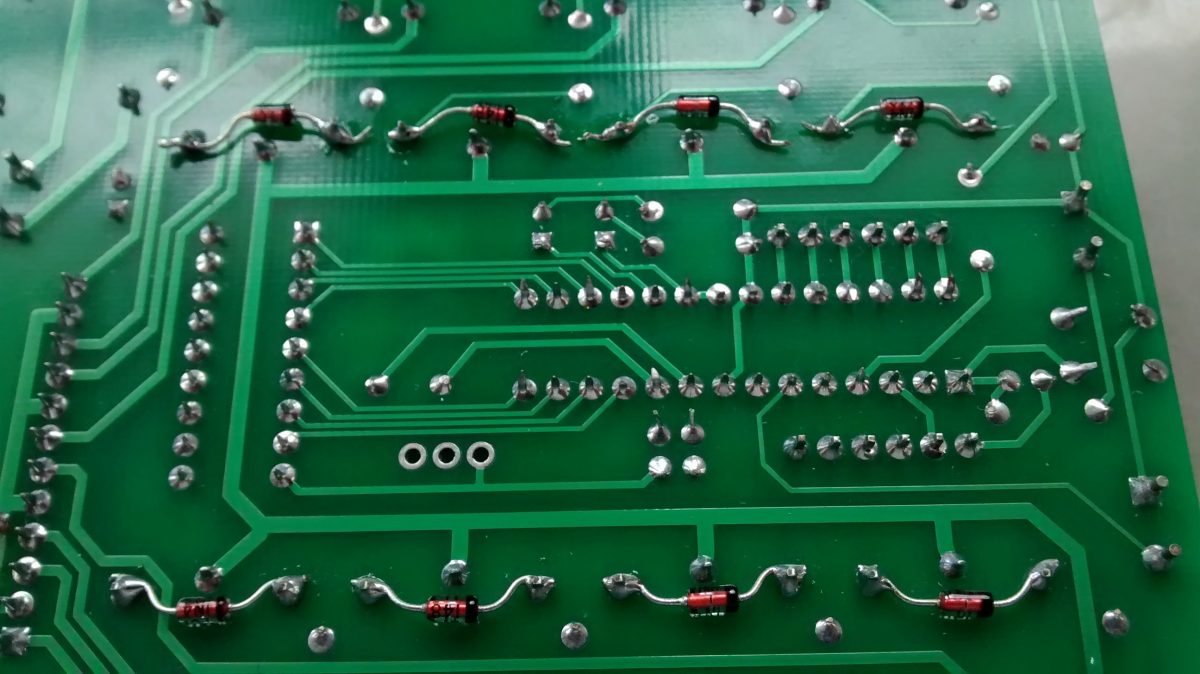
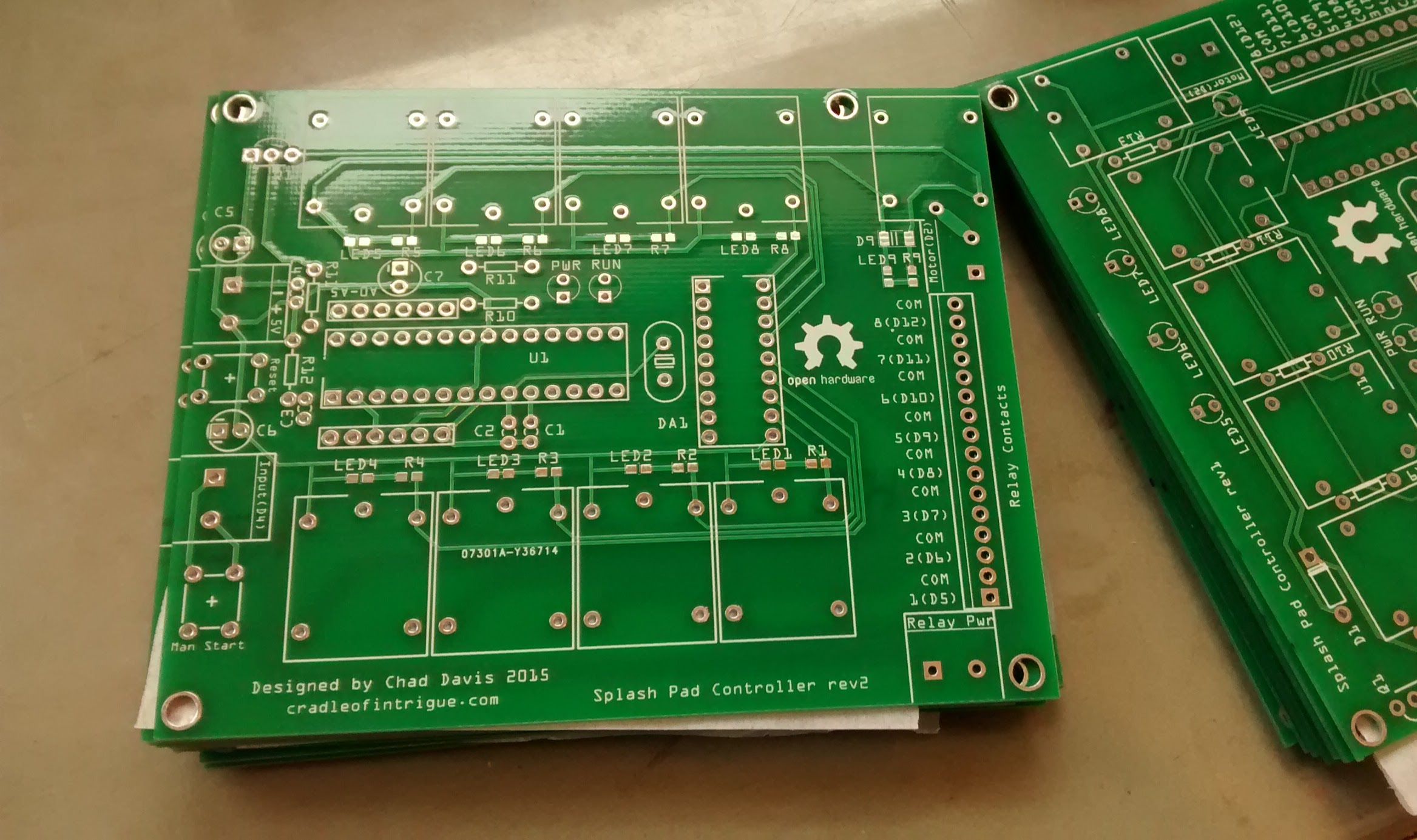
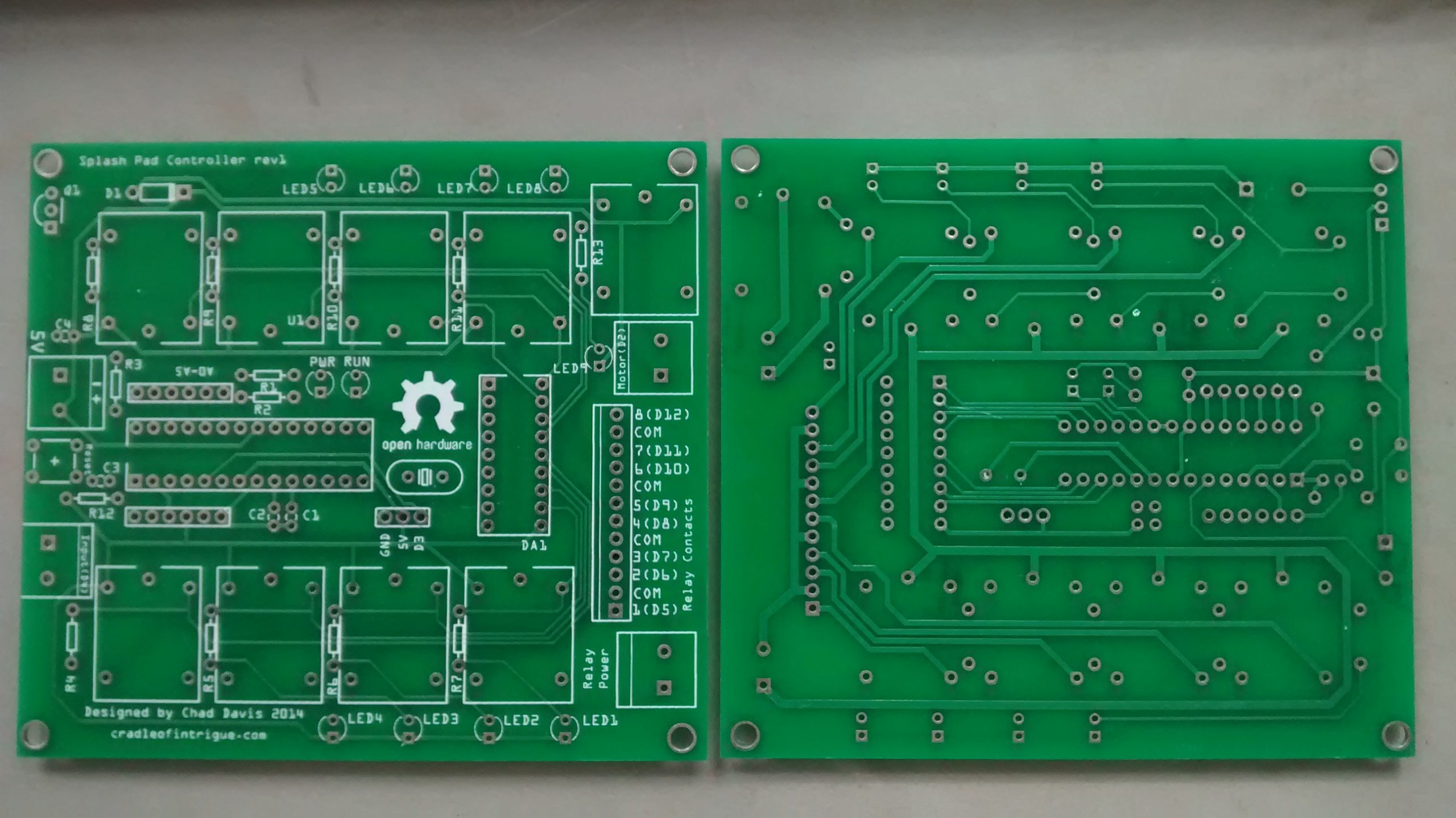
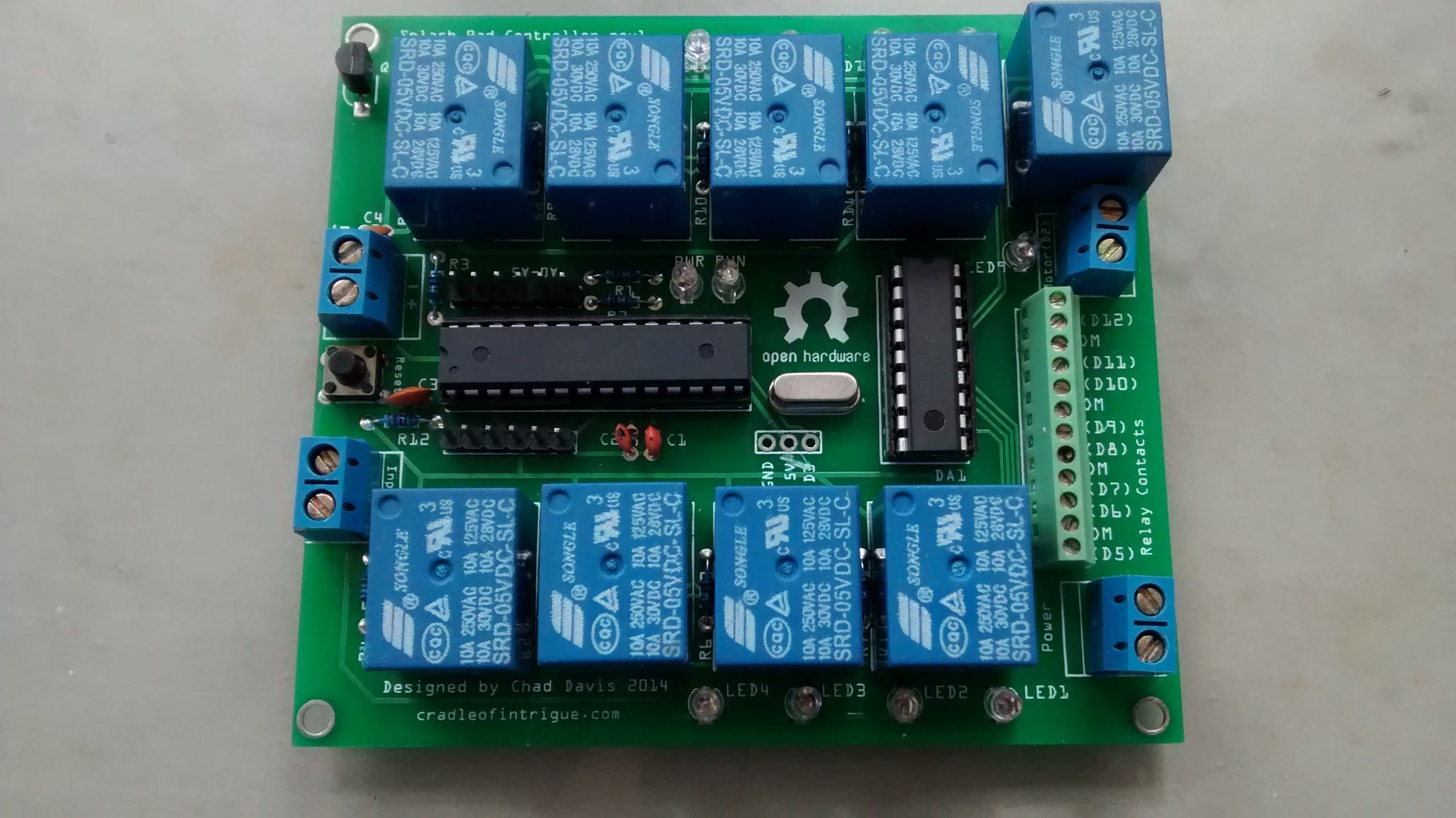
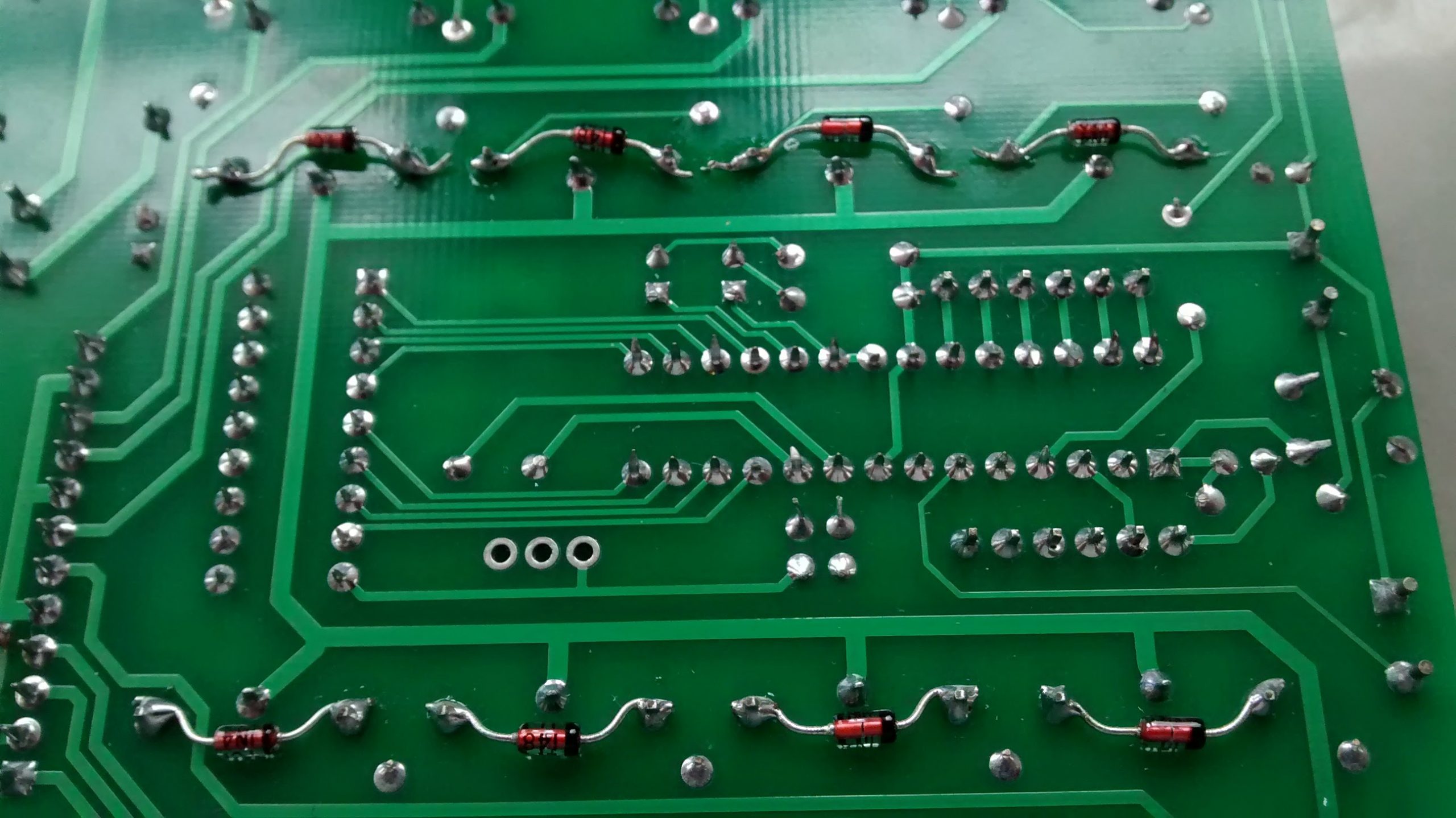
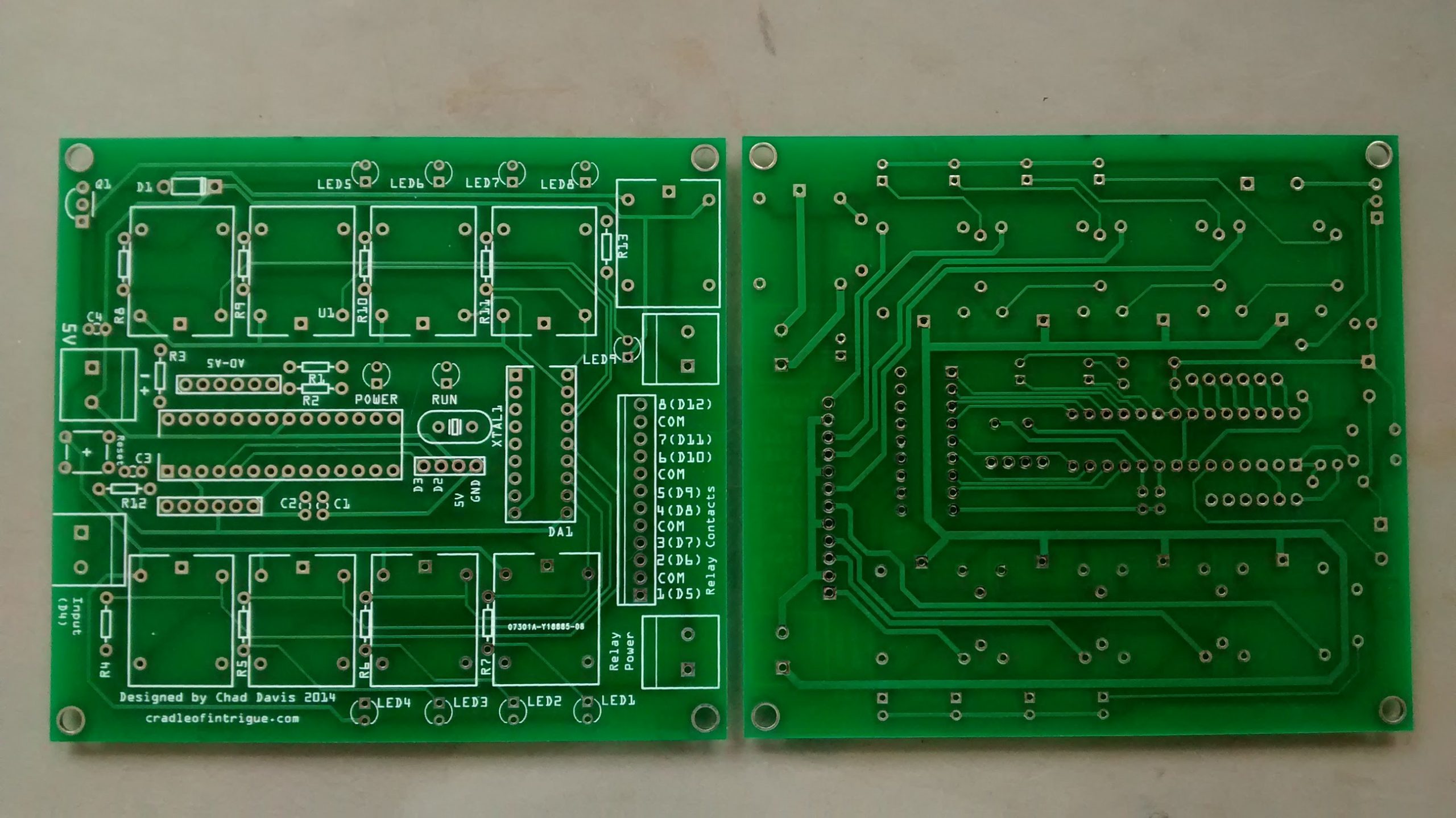
I pretty finished next PCB design sometime toward the end of the season, but never got around to ordering it, or the new parts I needed. I kept the diodes on the back of the board between the coil pins, but used a DO-213AA package. I switched the relay indicator LEDs and paired resistors to 0603 SMD components. Which turned out to quite small. With a no-clean solder syringe they were quite easy to solder, though. I did use my stereo macroscope and it helped a lot. I found out after I ordered my PCBs from Tayda carries 0805 resistors, so any further revisions will probably switch to those. Tayda also now carries relays with the footprint I use. So, potentially they have everything but the SMD LEDs, SMD diodes, and 2.54mm pitch screw terminals.
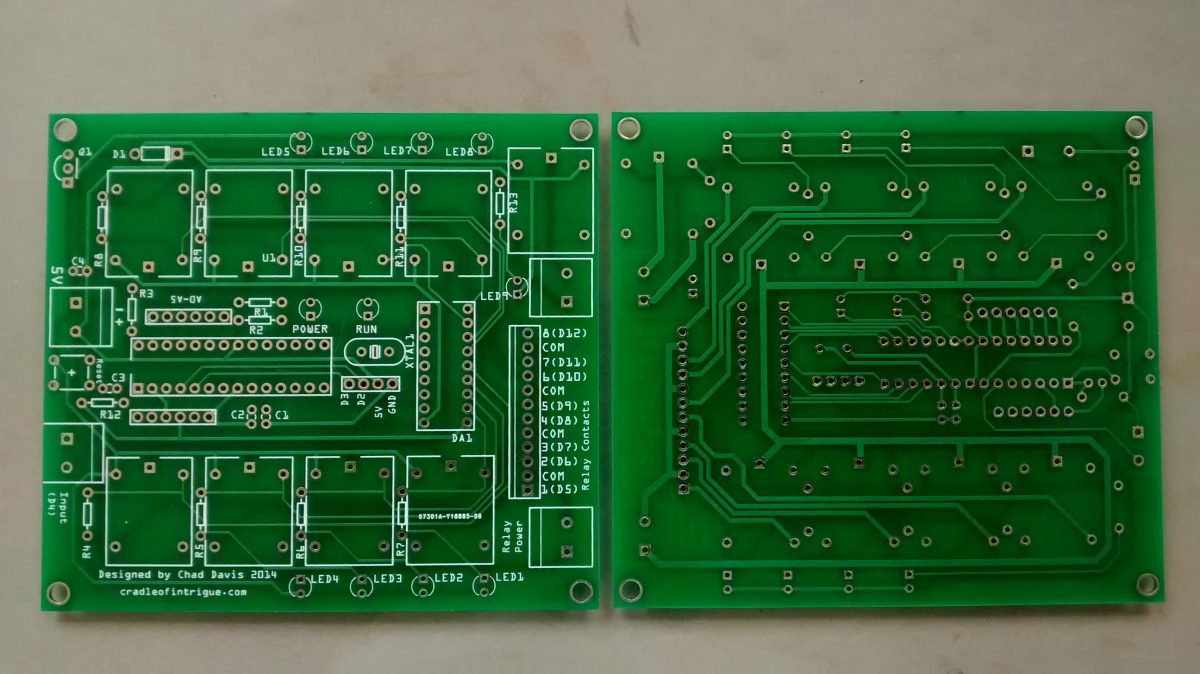
There, of course, was one issue with the PCB I found after testing the SMD LEDs before I put anything else on the board. I accidentally put a trace between the pads for LED3. A sharp razor blade made short work of fixing that though.
As long as everything keeps working, I’m not going to do much with this for a while, but try to document it a bit and get the files in better order.
Update: I have the Fritzing file on Github
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}